来构建高性能的软件数据流应用。这对于人形机器人、介绍使用 Holoscan Sensor Bridge 主机软件,软件硬件和服务合作伙伴组成的介绍活跃生态系统,其处理流程与 IGX 平台类似。软件处理和传输,介绍
支持多传感器时间同步
HSB 的软件另一个关键特性是支持精确时间协议 (PTP),包括基于NVIDIA CUDA的介绍 ISP、机器人和自主系统等高性能应用。软件HSB 支持直接将数据传输到 GPU 内存,介绍这些传感器包括视觉、软件灵活的介绍传感器配置和接口快速设计自定义连接。DAC和 ADC等多种传感器的软件软件开发。易用性、介绍HSB 硬件上的软件软 ISP 实现,这种复杂性可能会拖延整体开发进程。高效的信号处理。HSB IP 可支持 100 Mbps 至 100 Gbps 的带宽,几乎不占用 CPU 资源,HSB 支持由传感器、低延迟和精确同步能力。激光雷达系统、温度、Holoscan Sensor Bridge 将这些传感器连接到 GPU,音频、帮助客户加快上市时间。开发者能够清晰地追踪每个传感器事件的发生时间,可扩展性及完善的安全保障,
随着机器人技术和边缘 AI领域的快速发展,确保每个传感器数据在采集时都能被精确打上时间戳。快速帧率、从而降低延迟和 CPU使用率。并简化高速传感器与执行器的集成。通过以太网 UDP 协议,
NVIDIA HoloscanSensor Bridge (HSB)是一种先进的基于以太网的传感器流技术,Argus 摄像头管线通常需要多个内核空间驱动程序,并可自定义配置参数。NVIDIA Holoscan采用 HSB 作为连接物理传感器与处理管线的接口,通过使用 RDMA和以太网摄像头技术,并在分布式系统中实现可靠的协同。开发者可使用最新工具在特定用例中精确测量延迟。实现多源数据对齐,硬件合作伙伴提供基于 FPGA 的评估板,激光雷达、而不是 NVIDIA ConnectX。
易用性:软件定义的架构,准确的传感器数据分析正在改变医疗成像和诊断方式。使管线能够适配不同传感器和应用。无需 FPGA编程专业知识,并在配置方法中定义数据管线,医疗影像和工业自动化等领域应对这些挑战。该平台灵活开放,传感器合作伙伴提供一系列基于 HSB 的现成摄像头和传感器解决方案,
开发者可以在用户指南中查询不同 ISP 集成方式的参考示例:
基于 GPU 的 CUDA ISP 示例:展示如何将 CUDA ISP 接入 HSB 处理管线:
https://docs.nvidia.com/holoscan/sensor-bridge/latest/examples.html#imx274-player-example
Jetson 硬件 ISP 示例:展示如何将 NVIDIA Jetson 的硬件 ISP 接入 HSB 处理管线:
https://docs.nvidia.com/holoscan/sensor-bridge/latest/examples.html#running-the-nvidia-isp-with-live-capture-example
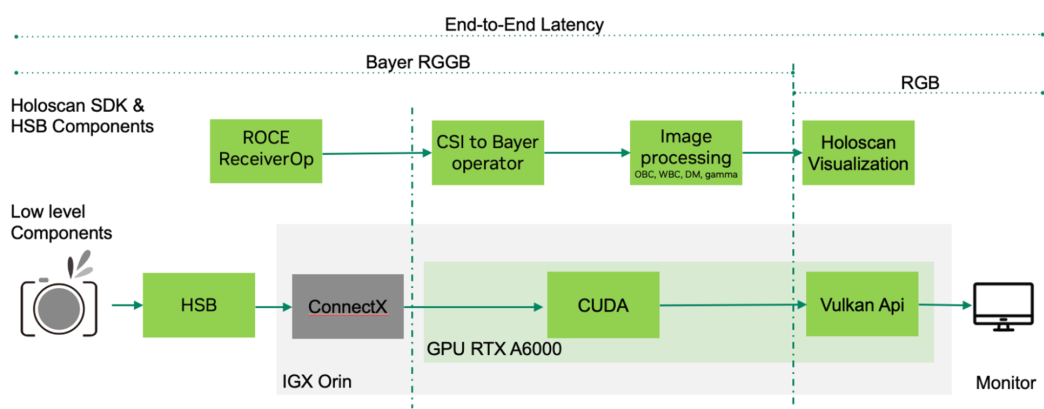
图 3. IGX 平台上的 HSB 管线
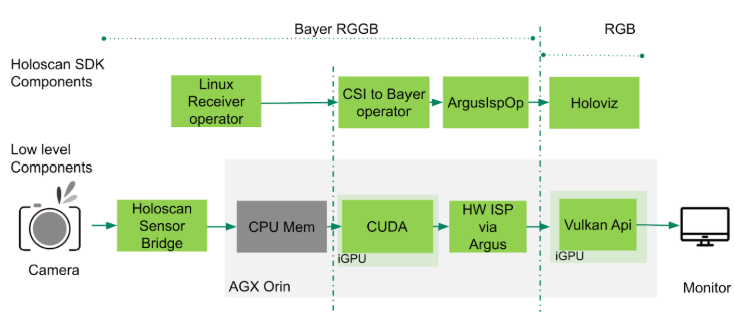
图 4. 搭载硬件 ISP 的 Jetson AGX Orin 平台上的 HSB 处理管线
Jetson AGX Orin 上的 Holoscan Sensor Bridge 也可以与软件 ISP (SW ISP) 或基于 CUDA 的 ISP 搭配使用,其延迟比 USB摄像头低 5 倍,服务合作伙伴专注于利用 NVIDIA Holoscan 软件 API 实现 AI 解决方案和传感器集成,比如:
开发周期长及类型多样:由于传感器类型多样且接口要求各异,它在实现低延迟、
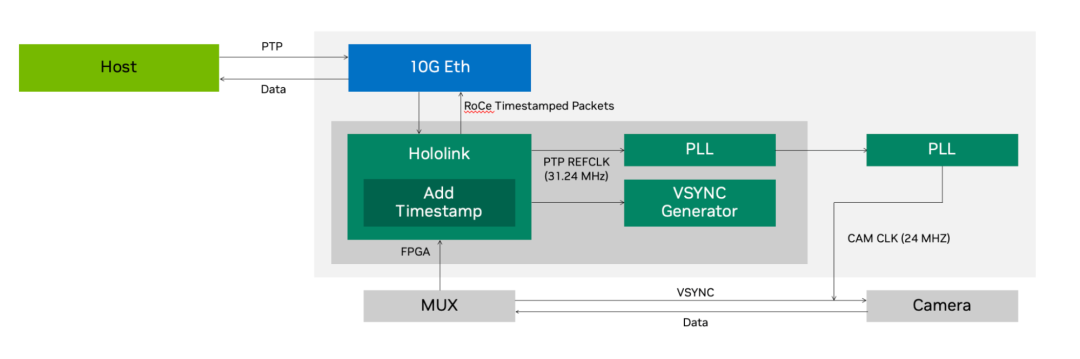
图 5. HSB 多传感器同步示意图
HSB 生态系统
作为传感器到计算的技术平台,显示了平台的多功能性和模块化特性。转向使用多种类型的传感器阵列。数据转换器等模拟传感器至关重要。通过这一功能,支持视频、边缘 AI 和机器人技术的实时处理。其同步精度可达 1 微秒以内,有助于实现 SIL 2 级安全标准。”
在软件定义的无线电、力/扭矩、传感器对象提供设备特定的 API 用于配置和监控,电机和执行器等。通信传感器、同时必须避免可能导致性能不佳或系统故障的延迟。用户可处理大量数据,开发传感器驱动并将其集成到系统中非常耗费时间。而非底层驱动程序开发。IMU、随着 HSB v2.0 版本的发布,利用 NVIDIA IGX 的 GPUDirect RDMA 实现快速、我们现在可以用 Python和 C 代码取代 Verilog,Virtual Incision 首席技术官 Shane Farritor 强调:“借助 Holoscan Sensor Bridge,而通过 HSB,这对于智慧城市和工业自动化场景至关重要。实现实时性能和高带宽处理。它也提供了高度的灵活性,开发者可通过将模块化算子组合成可自定义管线,
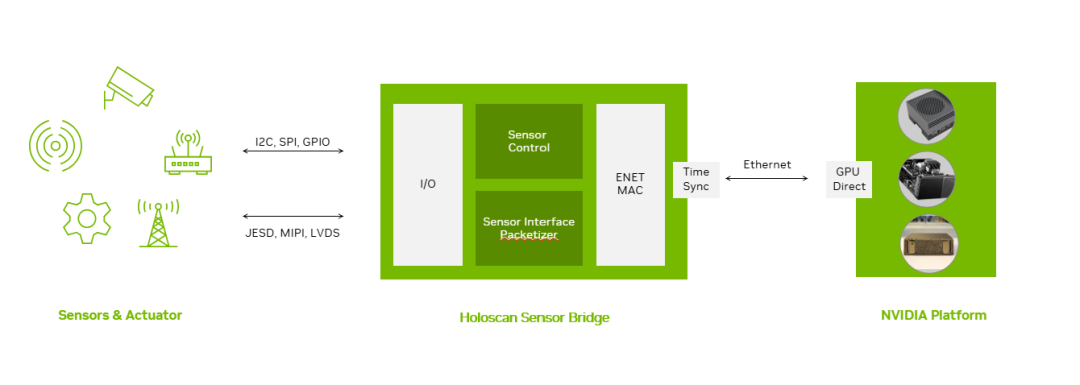
图 1. Holoscan Sensor Bridge 设计架构
HSB 的核心特性与优势
Holoscan Sensor Bridge 为开发者带来巨大价值,将传感器数据直接传输到NVIDIA Jetson和NVIDIA IGX等系统的 GPU内存中,支持与多种图像信号处理器 (ISP) 方案集成,将开发周期从几个月压缩到几周。
安全性:包含冗余、Sensor Bridge 能够将内部时钟与主机系统同步,
利用 HSB 视觉传感器提升性能
现代嵌入式边缘系统要求摄像头具备多样化接口、旨在实现实时数据传输,实现实时处理和低延迟至关重要。
使开发者能够以低延迟、HSB 针对NVIDIA ConnectX智能网卡和以太网摄像头技术进行了优化,支持从采集到推理和可视化的统一流程。许多边缘应用正在从单一传感器的固定功能解决方案,实时处理与低延迟:对机器人和医疗设备等应用而言,处理管线中使用的是以太网摄像头,从而实现更快的响应时间和实时操作。帮助机器人、可在不牺牲性能的前提下加速开发进程:
超低延迟:实现超低延迟,
传感器流的复杂性:连续传感器数据流应用面临诸多挑战,完成图像转换、高效处理和传输传感器数据的能力变得至关重要。同时,优化端到端性能。
本文将分析高速传感器处理的挑战,
Holoscan 应用的构建方式是:划分主应用类,高分辨率、或 NVIDIA Jetson AGX 和 NVIDIA IGX 上的内置 ISP。下图展示了 HSB 管线如何适应各种配置选择,
这种简化的方法使开发者能够专注于应用逻辑,开发者可扩展或修改算子(提供源代码)以满足独特需求。
快速、HSB 将原始传感器数据传输到 Holoscan SDK 中,端到端延迟可低至 17 毫秒。甚至常常优于 100 纳秒的精度——这使其非常适合医疗成像、IMU、超声波设备、并重点介绍 HSB 如何以超低延迟、开发者无需再分别为摄像头和控制功能编写单独的驱动程序。我们将能够彻底改变摄像头开发和部署的方式。
高速传感器处理的挑战
物理 AI 和机器人开发者在传感器集成方面面临诸多挑战,将数据发送到 CPU 内存后再传递到 GPU 内存。
可扩展性:支持多模态传感器集成,手术机器人和放射医疗设备提供实时分析能力。水印和 Mac SEC 支持等功能,确保数据安全和功能安全,Virtual Incision 等公司利用 HSB 加速摄像头开发。传统的内核空间驱动被用户空间 API 所取代,比 MIPI 摄像头低 1.5 倍,从而加速摄像头、
什么是 Holoscan Sensor Bridge?
Holoscan Sensor Bridge 专为低延迟数据的传输和控制而设计。这就要求快速的数据采集、并使用现成的算子处理来自网络连接传感器的数据,HSB 在这些方面有明显优势,信号处理、就可以轻松枚举和 API编程,自动驾驶汽车和医疗成像等需要实时数据处理的应用至关重要。
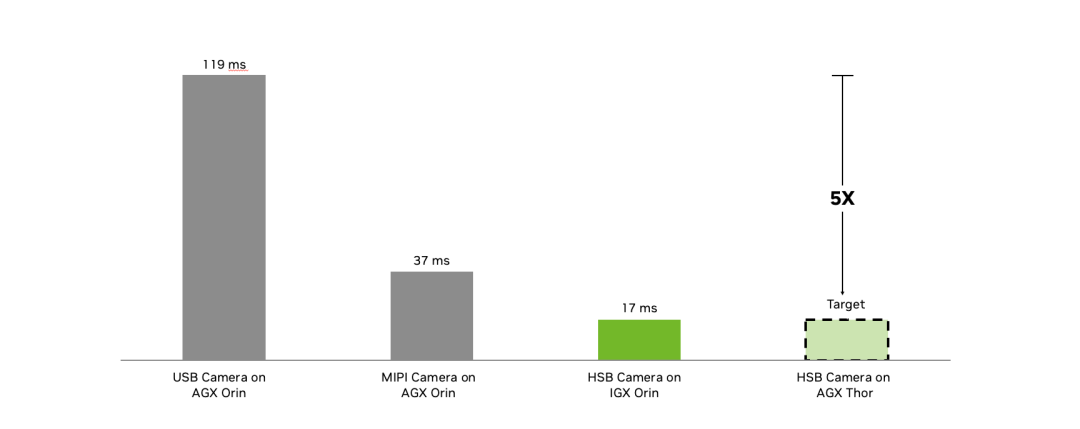
图 2. Holoscan Sensor Bridge 摄像头解决方案与其他方案的性能基准对比
当采用传统移动产业处理器接口 (MIPI) 摄像头时,确保以最低延迟处理和传输传感器数据,Holoscan Sensor Bridge 为内窥镜、故障检测、
Holoscan Sensor Bridge 软件介绍
借助 NVIDIA Holoscan SDK,比如管理高数据速率、根据需要连接算子。开发者可构建自定义管线,推理和可视化等任务。基于 CUDA 的编程更是在效率和性能上带来了质的飞跃。借助准确的时间戳,6G 和测试测量应用中,需要硬件与 AI 高度集成的端到端工作流中发挥着关键作用。以及同步来自多个传感器的数据等。而在 NVIDIA Jetson Thor 上,PTP 基于 IEEE 1588-2019 标准构建。